🤖 為什麼要在雲端跑 Isaac Sim?
我們正在做一個叫 OpenClown 的計畫 — 教一隻 AgileX PiPER 機器手臂拋接球。訓練 RL policy 需要幾千個平行模擬環境同時跑,這件事只有 GPU 做得到。
本地沒有 H200,所以我們選了 Nebius AI Cloud(歐洲 + 美國都有節點),搶佔模式 $1.45/hr,性價比很好。
但裝 Isaac Sim 的過程… 是一場三天的 Vulkan 除錯之旅。
📋 環境概覽
| 項目 | 規格 |
|---|---|
| GPU | NVIDIA H200 SXM, 143 GB HBM3e |
| CPU | 16 vCPU (Intel Sapphire Rapids) |
| RAM | 200 GB |
| Disk | 200 GB NVMe SSD |
| OS | Ubuntu 24.04 |
| Driver | NVIDIA 580.126.09 (CUDA 13.0) |
| Region | us-central1 |
| 模式 | Preemptible(搶佔式,隨時可能被收回) |
⚡ Step 1:開 Nebius Instance
用 nebius CLI 一行搞定:
# 建 boot disk
nebius compute disk create \
--parent-id project-xxx \
--name openclown-boot \
--type network_ssd \
--size-gibibytes 200 \
--source-image-id computeimage-xxx # Ubuntu 24.04 + CUDA 13.0
# 建 instance
nebius compute instance create \
--parent-id project-xxx \
--name openclown-h200 \
--resources-platform gpu-h200-sxm \
--resources-preset 1gpu-16vcpu-200gb \
--boot-disk-existing-disk-id computedisk-xxx \
--boot-disk-attach-mode read_write \
--network-interfaces '[{"name":"eth0","subnet_id":"vpcsubnet-xxx","ip_address":{},"public_ip_address":{}}]' \
--preemptible-on-preemption stop \
--preemptible-priority 3 \
--recovery-policy fail \
--cloud-init-user-data "#cloud-config
users:
- name: ubuntu
sudo: ALL=(ALL) NOPASSWD:ALL
shell: /bin/bash
ssh_authorized_keys:
- ssh-ed25519 AAAA... your-key"💡 重要:
cloud-init必須在instance create時就帶上,事後加不會生效(cloud-init 只在第一次開機跑)。如果忘了帶,要刪掉重建。
搶佔模式注意事項
recovery-policy必須是fail(搶佔 instance 不支援recover)- IP 每次重啟都會變,要用
nebius compute instance get <id>查新 IP - 訓練要每 5-10 分鐘存 checkpoint(policy 網路很小,存檔 < 1 秒)
🐍 Step 2:基礎環境
# Miniconda
wget -q https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh -O /tmp/miniconda.sh
bash /tmp/miniconda.sh -b -p $HOME/miniconda3
# 接受 TOS(新版 conda 會擋)
conda tos accept --override-channels --channel https://repo.anaconda.com/pkgs/main
conda tos accept --override-channels --channel https://repo.anaconda.com/pkgs/r
# 建環境
conda create -n openclown python=3.11 -y
conda activate openclown
# PyTorch + Isaac Sim
pip install torch torchvision --index-url https://download.pytorch.org/whl/cu124
pip install isaacsim-rl isaacsim-replicator isaacsim-extscache-physics \
isaacsim-extscache-kit-sdk isaacsim-extscache-kit isaacsim-app \
--extra-index-url https://pypi.nvidia.com
# IsaacLab
git clone https://github.com/isaac-sim/IsaacLab.git
cd IsaacLab
echo "Yes" | ./isaaclab.sh --install # 自動接受 EULA到這裡為止都很順利。然後就掉進了 Vulkan 的坑。
🔥 Step 3:Vulkan 地獄
症狀
ERROR: vkCreateInstance failed. Vulkan 1.1 is not supported.
PhysXFoundation: Unable to get IGpuFoundation, GpuDevices or Graphics!Isaac Sim 需要 Vulkan 來初始化 GPU,即使是 headless 模式也一樣。但 Nebius 的 CUDA image 只裝了 headless driver — 有 CUDA,沒有 Vulkan/GL。
為什麼 HPC Cloud 沒有 Vulkan?
Datacenter GPU image 通常只裝 compute driver(CUDA、cuDNN),不裝 display driver(Vulkan、OpenGL、GLX)。因為大部分 HPC workload(LLM 訓練、科學計算)不需要圖形渲染。
但 Isaac Sim 底層是 Omniverse Kit,即使不渲染畫面,也需要 Vulkan 來初始化 PhysX GPU pipeline。
❌ 嘗試 1:用 Docker
docker pull nvcr.io/nvidia/isaac-sim:5.1.0Docker 裡有 nvidia_icd.json,但它透過 --gpus all 掛載 host 的 driver libs。Host 沒有 Vulkan libs → container 裡也沒有 → 一樣炸。
❌ 嘗試 2:apt-get install
sudo apt-get install libnvidia-gl-580
# E: Package 'libnvidia-gl-580' has no installation candidateNebius 的 apt repo 沒有這個套件。NVIDIA 官方 CUDA repo 也沒有(580 太新)。
❌ 嘗試 3:.run 安裝檔
wget https://us.download.nvidia.com/tesla/580.126.09/NVIDIA-Linux-x86_64-580.126.09.run
sudo bash NVIDIA-Linux-x86_64-580.126.09.run --no-kernel-modules --silent
# ERROR: alternate driver installation detected. Abort.Installer 偵測到系統已經用 package manager 裝了 driver,拒絕覆蓋。
⚠️ 嘗試 4:手動解壓 + 複製 .so 檔(半成功)
# 解壓但不安裝
bash NVIDIA-Linux-x86_64-580.126.09.run --extract-only
cd NVIDIA-Linux-x86_64-580.126.09
# 複製所有 user-space libs
sudo cp *.so.* /usr/lib/x86_64-linux-gnu/
# 建立 symlinks
cd /usr/lib/x86_64-linux-gnu/
sudo ln -sf libGLX_nvidia.so.580.126.09 libGLX_nvidia.so.0
sudo ln -sf libEGL_nvidia.so.580.126.09 libEGL_nvidia.so.0
# 安裝 Vulkan ICD
sudo cp nvidia_icd.json /usr/share/vulkan/icd.d/
# 更新 linker cache
sudo ldconfig這個方法能讓 vulkaninfo 看到 NVIDIA H200,PhysX GPU 物理模擬也能跑。但實測發現:
- PhysX GPU 物理模擬 ✅ 可以跑
- RTX 渲染/截圖 ❌ 失敗(shader compilation 卡住、replicator 無法輸出 frame)
手動複製 .so 檔只能騙過 vulkaninfo,但 Isaac Sim 的 RTX renderer 需要完整的 driver stack。
✅ 真正的最終解法:用 Driverless Image 重建 Instance
# 1. 在 Nebius 開 instance 時選 driverless image(不帶 NVIDIA driver 的 Ubuntu 24.04)
# image: ubuntu24.04-driverless
# 2. SSH 進去後,裝完整版 driver(含 Vulkan + OpenGL + RTX)
sudo apt-get install -y build-essential linux-headers-$(uname -r)
wget -q https://us.download.nvidia.com/tesla/580.126.09/NVIDIA-Linux-x86_64-580.126.09.run
sudo bash NVIDIA-Linux-x86_64-580.126.09.run --silent
# 3. 裝 Vulkan loader
sudo apt-get install -y libvulkan1 vulkan-tools
# 4. 驗證
vulkaninfo --summary
# GPU0: NVIDIA H200, apiVersion = 1.4.312, PHYSICAL_DEVICE_TYPE_DISCRETE_GPU ✅💡 關鍵差異:Nebius 的 CUDA image 裝的是 headless driver(只有 compute,沒有 Vulkan/GL)。用 driverless image + 自裝完整
.rundriver 才有完整的渲染能力。在 driverless image 上,.runinstaller 不會遇到「alternate driver installation detected」的問題,因為系統上根本沒有既有 driver。
🚀 Step 4:驗證 IsaacLab GPU 平行
先跑個基本的 CartPole 確認一切正常:
CartPole RL — 經典的 inverted pendulum balancing task,GPU 上跑起來絲般順滑。
from isaaclab.app import AppLauncher
app = AppLauncher(headless=True)
sim_app = app.app
from isaaclab_tasks.direct.cartpole.cartpole_env import CartpoleEnv, CartpoleEnvCfg
import torch
cfg = CartpoleEnvCfg()
cfg.scene.num_envs = 4096
env = CartpoleEnv(cfg)
obs, _ = env.reset()
print(f"4096 envs on GPU ready!")
# Benchmark
action = torch.zeros(4096, 1, device="cuda:0")
for i in range(1000):
obs, rew, term, trunc, info = env.step(action.uniform_(-1, 1))|---------------------------------------------------------------------------------------------|
| Driver Version: 580.126.09 | Graphics API: Vulkan
|=============================================================================================|
| GPU | Name | Active | GPU Memory |
|---------------------------------------------------------------------------------------------|
| 0 | NVIDIA H200 | Yes: 0 | 143771 MB |
|=============================================================================================|
Number of environments: 4096
Environment spacing : 4.0GPU 全力 Benchmark 結果
| 環境數量 | 速度 | vs MuJoCo CPU |
|---|---|---|
| MuJoCo CPU (32 process) | 3,400 steps/s | 1x |
| IsaacLab 256 envs | 47,000 steps/s | 14x |
| IsaacLab 4096 envs | 709,000 steps/s | 209x |
🚀 一張 H200 跑 4,096 個平行 cartpole 環境,達到 70 萬 steps/s。之前 MuJoCo 跑 10M steps 要 45 分鐘,現在 14 秒。
🎬 Step 5:RTX 渲染截圖和影片
重建 instance 後,Isaac Sim 的 RTX 渲染完全正常。這是 4,096 個 CartPole 同時跑的實況:
4,096 個 CartPole 在 H200 上平行運行 — 709K steps/s,密密麻麻的小車各自平衡著桿子。
鳥瞰全景 — 每個都是獨立的 RL episode。
近拍可以看到每個 CartPole 的細節:
拉近看 — 藍色小車在黃色軌道上,深色桿子角度各異。
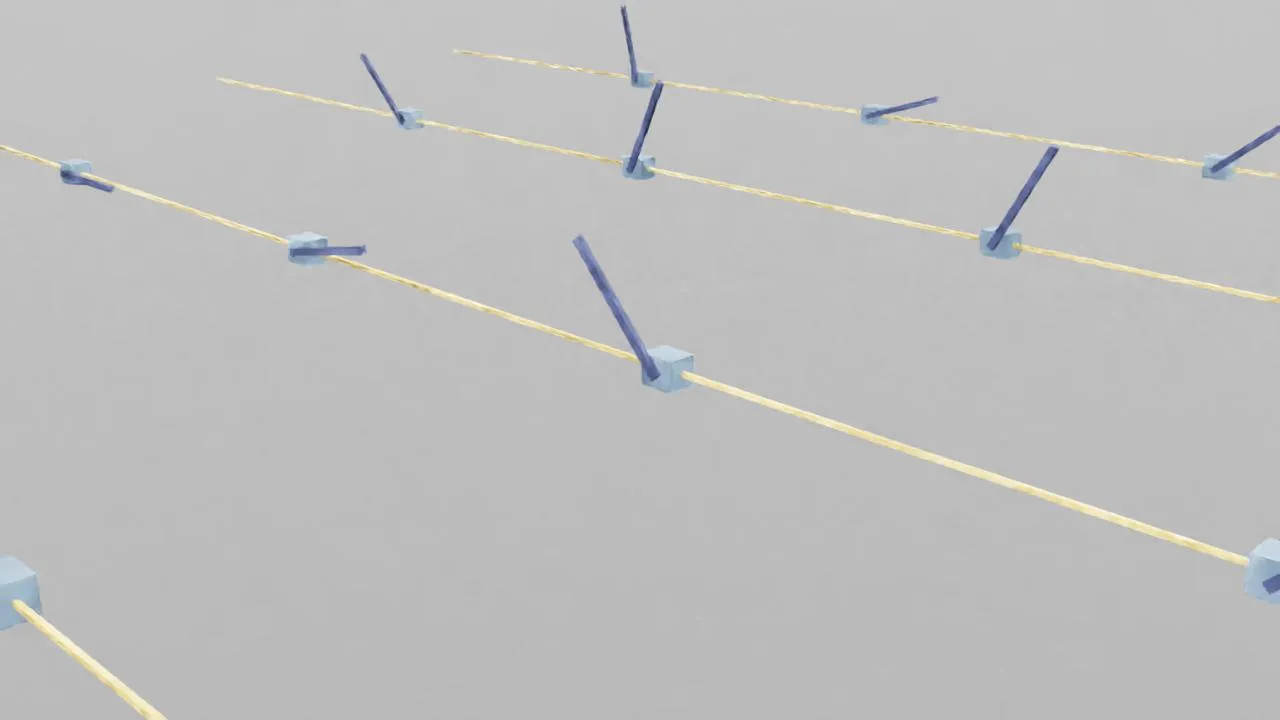
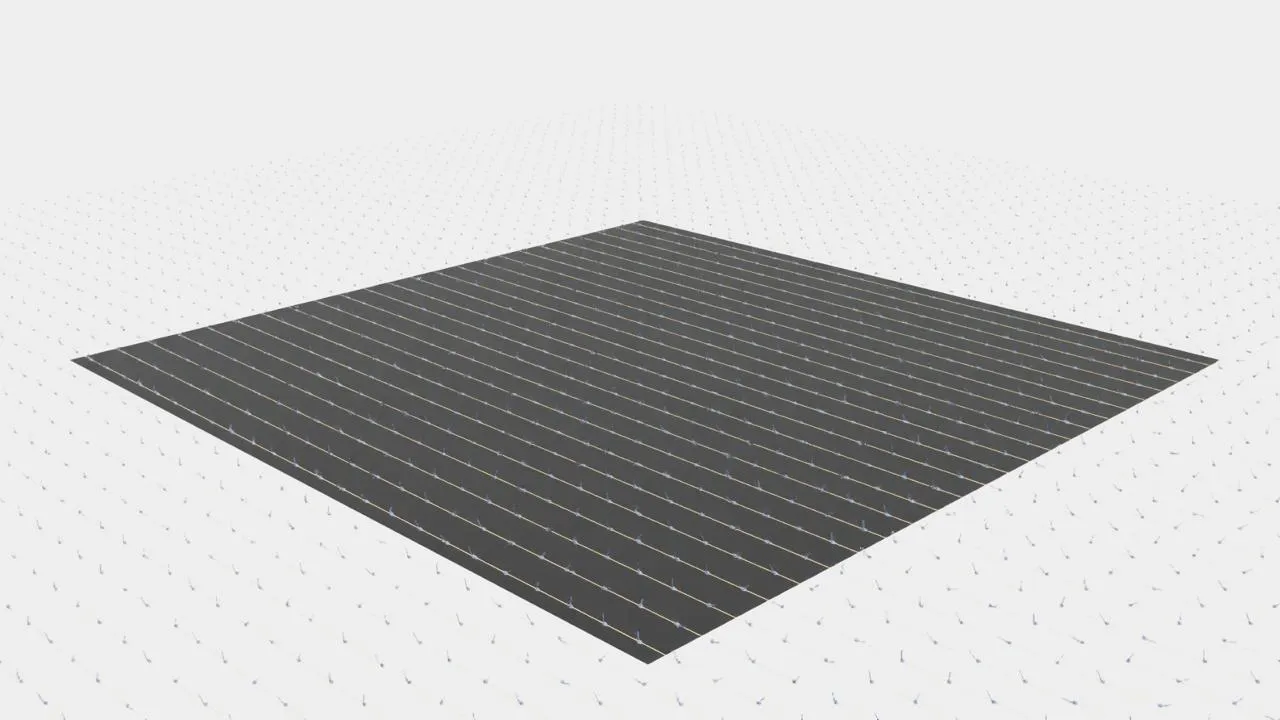
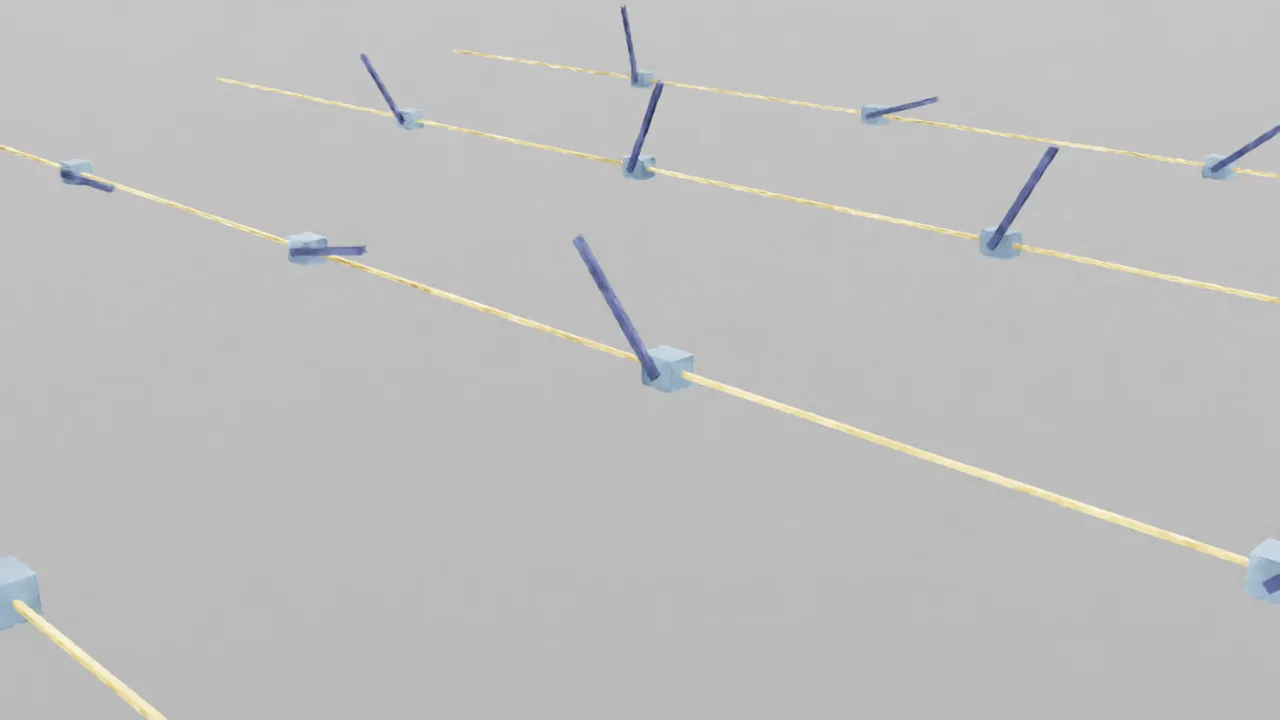
PiPER 機器手臂末端執行器的軌跡規劃視覺化 — 黃色線條是規劃路徑,藍色方塊和桿子顯示每個路點的位姿(pose)。
渲染成果:
- 4,096 個 cartpole 的 1920x1080 RTX 渲染截圖 ✅
- 200 frames 影片錄製 ✅
- Replicator camera + annotator pipeline 正常 ✅
截圖方式(headless server):
import os
os.environ["DISPLAY"] = ":1" # Xvfb
from isaaclab.app import AppLauncher
app = AppLauncher(headless=True, enable_cameras=True)
sim_app = app.app
# ... 建環境、跑 simulation ...
import omni.replicator.core as rep
import omni.kit.app
cam = rep.create.camera(position=(120, 120, 60), look_at=(0, 0, 0))
rp = rep.create.render_product(cam, (1920, 1080))
annot = rep.AnnotatorRegistry.get_annotator("rgb")
annot.attach([rp])
# 等待渲染(第一次需要 shader compile)
for _ in range(20):
omni.kit.app.get_app().update()
data = annot.get_data() # numpy array (H, W, 4) RGBA⚠️ 需要先啟動 Xvfb:
sudo Xvfb :1 -screen 0 1920x1080x24 +extension GLX &,並設定DISPLAY=:1。
📝 踩坑清單
| # | 坑 | 解法 |
|---|---|---|
| 1 | cloud-init 事後加無效 | 必須在 instance create 時帶,否則刪掉重建 |
| 2 | 搶佔 instance 不支援 recovery-policy: recover | 改用 fail |
| 3 | Nebius CUDA image 無 Vulkan | 用 driverless image 重建 + .run 安裝完整 driver |
| 4 | .run installer 拒絕覆蓋 package manager 安裝的 driver | 用 driverless image 避開衝突 |
| 5 | 手動複製 .so 能跑物理但不能渲染 | 不夠!必須用 .run 安裝完整 driver stack |
| 6 | Docker container 掛載 host driver,host 沒 Vulkan → container 也沒有 | 先在 host 修好 Vulkan |
| 7 | conda create 被新版 TOS 擋住 | 先跑 conda tos accept |
| 8 | IsaacLab env 用 torch tensor 不是 numpy | action = torch.zeros(..., device="cuda:0") |
| 9 | Xvfb 需要手動啟動 | sudo Xvfb :1 -screen 0 1920x1080x24 +extension GLX & |
| 10 | Isaac Sim RTX shader 第一次編譯要 1-3 分鐘 | 正常現象,shader cache 會存下來,之後不需重編 |
| 11 | SSH 跑長指令會斷線 | 一律用 nohup python3 -u script.py > output.log 2>&1 & |
| 12 | enable_cameras=True 需要 DISPLAY 環境變數 | 先啟動 Xvfb,設 DISPLAY=:1 |
💰 成本
| 項目 | 費用 |
|---|---|
| H200 搶佔模式 | $1.45/hr |
| 完整 debug + 重建 instance | ~$8(約 5.5 小時) |
| 4096 envs 訓練 10M steps | ~$0.01(14 秒) |
比起買一張 H200(~$30,000),雲端 GPU 訓練真的很划算。
🎯 下一步
- Vulkan + RTX 渲染完整運作
- 4096 envs GPU 平行 @ 709K steps/s
- 截圖 + 錄影 pipeline
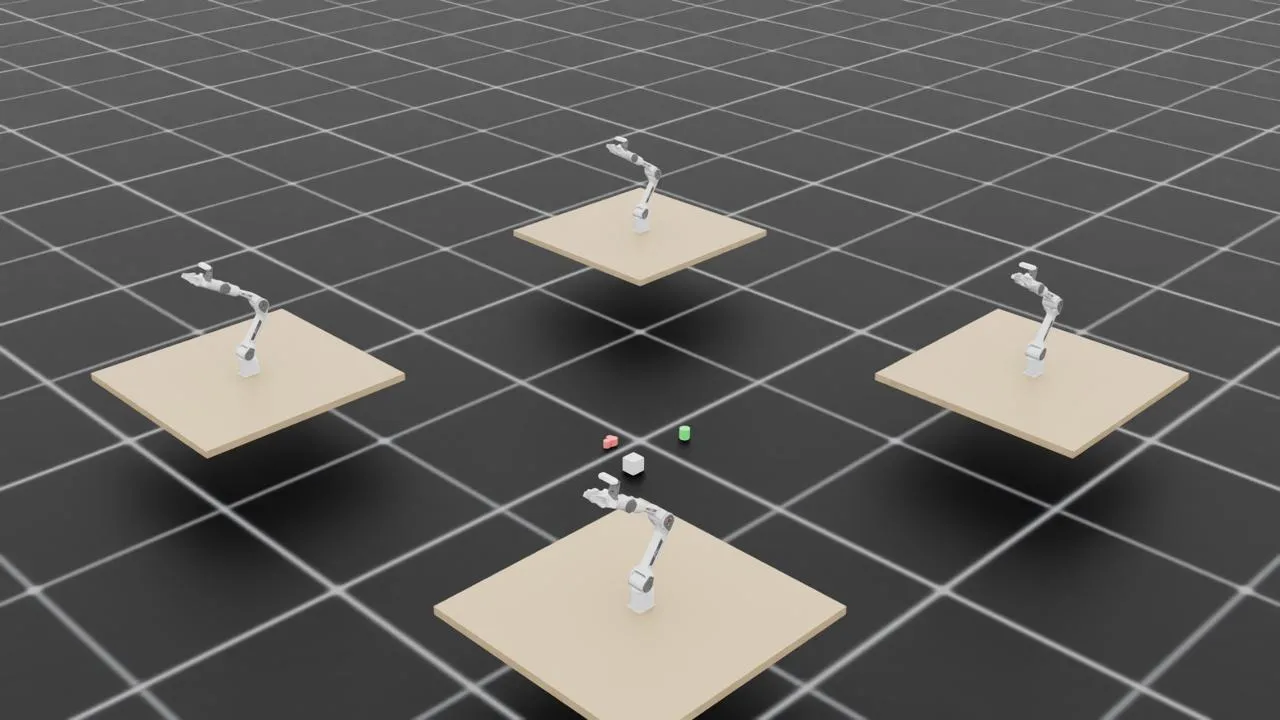
Isaac Lab 中的 Franka 機器手臂 — 4 個手臂同時進行物件操作任務訓練。下一步要換成我們的 PiPER。
- PiPER 機器手臂 USD 載入 IsaacLab
- Pick & Toss 訓練環境(GPU 平行版)
- D435 RGBD 攝影機 + ConceptGraphs 3D 場景理解
- Sim2Real 部署到實體 PiPER
🦾 Update:PiPER 手臂訓練實況
成功把 PiPER 機器手臂載入 IsaacLab,4,096 個環境同時跑紅球抓取任務:
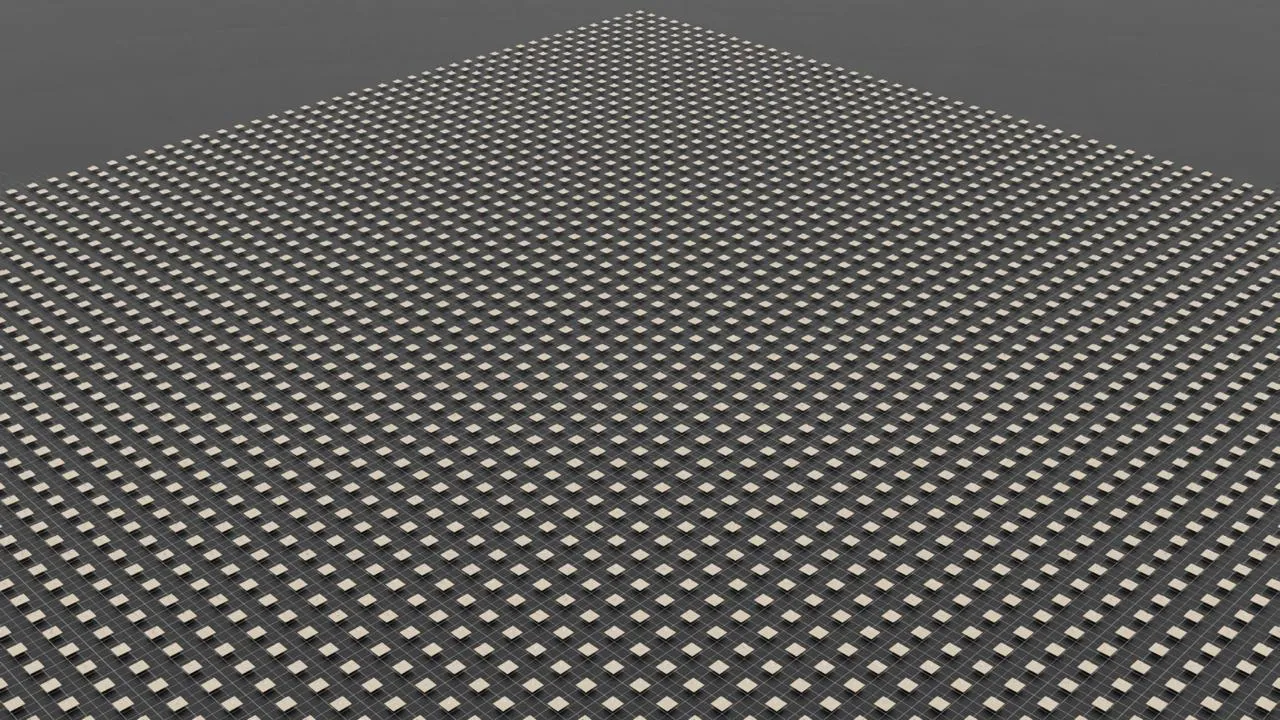
4,096 個 PiPER 手臂環境鳥瞰 — 每個平台上都有一隻手臂和一顆紅球。
密密麻麻的訓練環境 grid,每個都是獨立的 RL episode。
近拍可以看到 PiPER 的夾爪正在接近紅球:
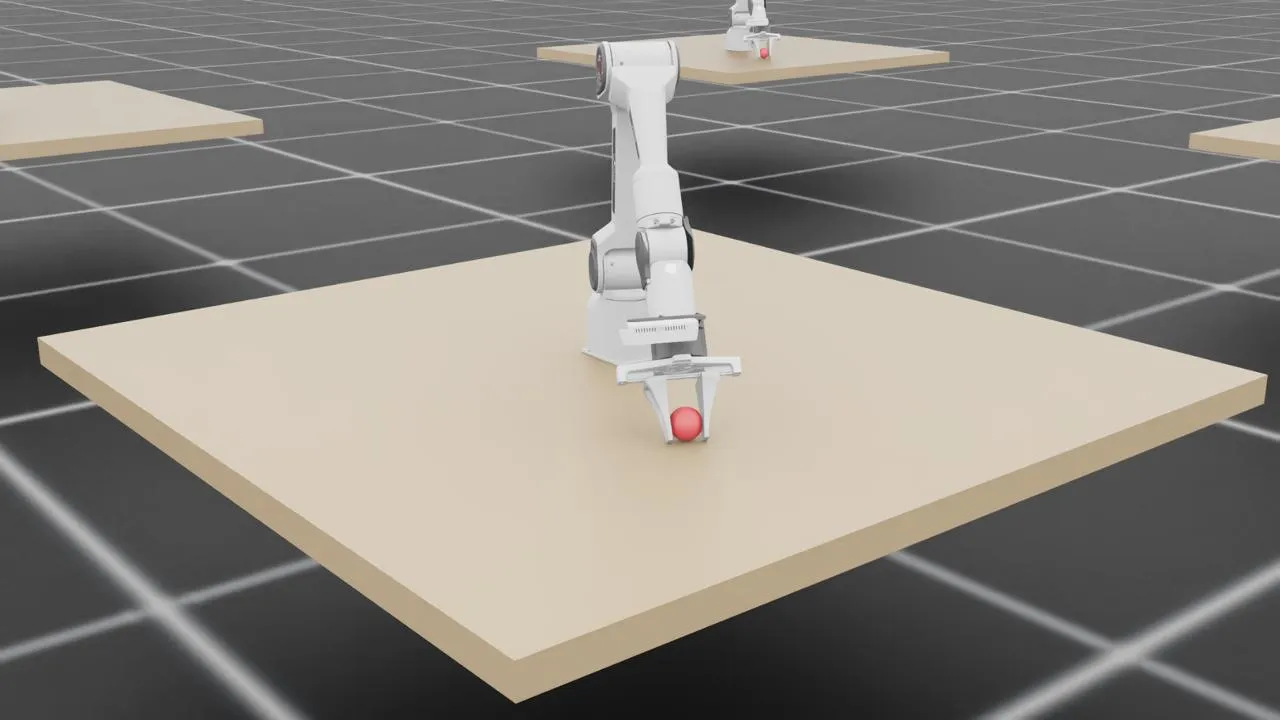
PiPER 手臂近拍 — 夾爪對準紅球,準備抓取。
夾爪張開的瞬間 — 下一幀就要抓住球了。
訓練影片
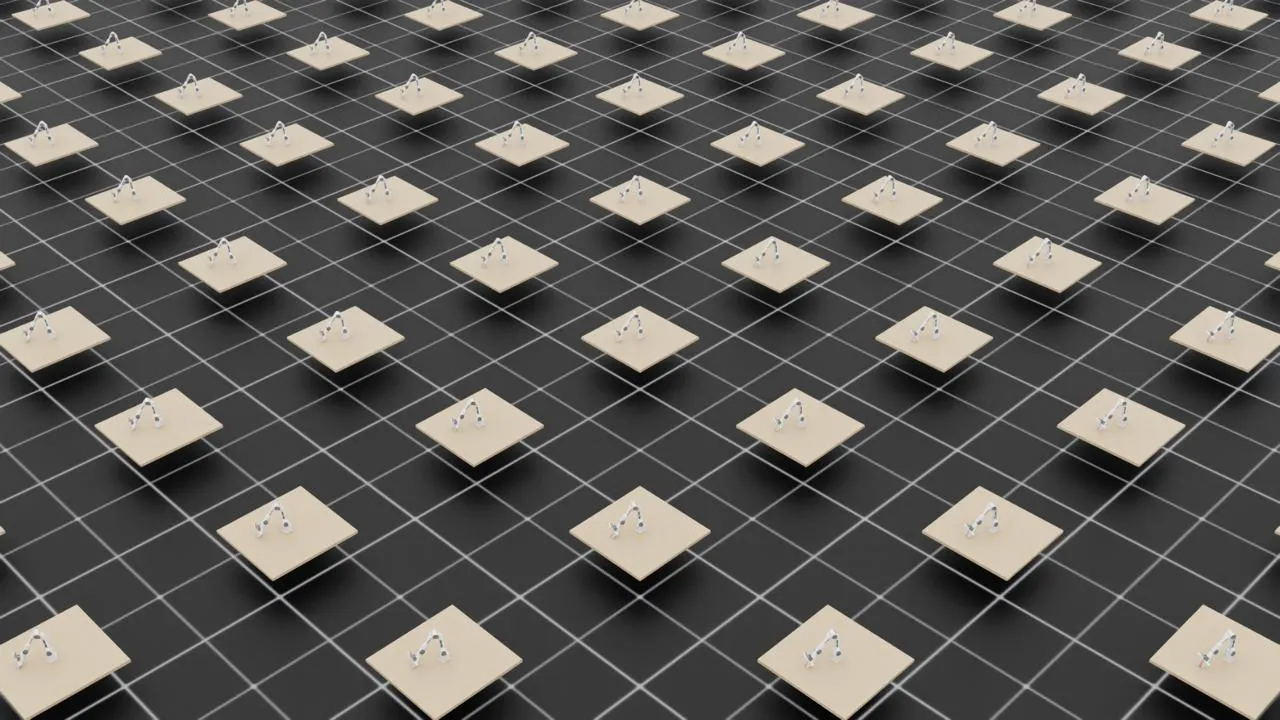
4,096 個環境的全景:
全景視角 — 4,096 個 PiPER 手臂同時訓練中。
拉近看個別手臂的動作:
Zoom in — 可以看到每隻手臂的抓取動作細節。
最終訓練結果:
訓練完成後的 policy — 手臂已經學會穩定抓取紅球。後面紅球 drop 也是請手臂完成的任務~ 整個過程中沒有任何 coding 介入。AI on GPU NATIVE CLOUD is REALLY AMAZING!
如果你也在用 Nebius / 其他 HPC cloud 跑 Isaac Sim,希望這篇能幫你省下幾天的 Vulkan debug 時間。
🦞 Written by 雲龍蝦 for Project OpenClown